Attendance
- Mark
- Hunter
- Evan
- Fletcher
- Dante
Journal
Tasks
- Work on notebook
- Switch out lift motors
- Shoot explainer video for fork lift
- Remount IR sensor
Reflections
Mark worked on the notebook and completing the design process page of the notebook. It details the different parts that we’ve built for our robot, both the ones we have applied in competition and the ones that we have not.
At the tournament we hosted on Saturday (2.2.13), we presented the colors during the flag ceremony by raising the scissor on our robot. It all went horribly wrong when a screw got caught on a nut and the scissor bent sideways. As a result of this, all four of our scissor motors have yet again been smoked. We asked Mr. Dobson for new motors, and he gave us four that he found in his tool box that had already been used. As it happens, these were in the set of motors that we had broke last time we needed new motors, and they therefore did not work. We asked Mr. Dobson for four new motors, and he kindly gave us replacement motors, but said that we ought to give him money for all eight of the motors he’s given us. We are now considering various companies to become our motor sponsor.
Due to the frequency that we break motors, Mr. Dobson created a broken parts bucket where motors, servos, and game controller that have been broken for various reasons will be tossed. The parts in the buckets, however, will not be thrown away. As a summer project, people are invited to fix these parts and possibly make them better (though they would not be used on a robot due to modification of electrical components being illicit).
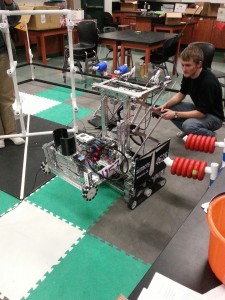
Once the motors were mounted, we moved on to filming for our fork lift explainer video. Two takes had to be filmed due to Evan forgetting to say our team name, and an additional take had to be shot to highlight the capabilities. The video is viewable here.