Attendance
- Hunter
- Mark
- Evan
Journal
Tasks
- Build Scissor
- Wait for computer to be fixed
Reflections
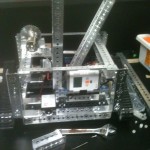
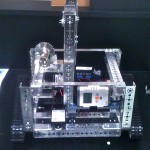
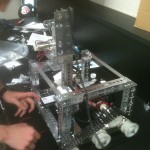
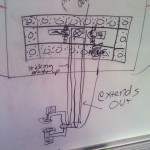
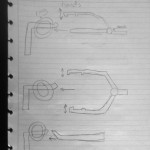
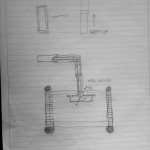
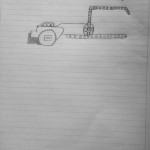
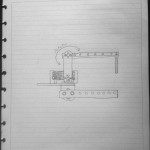
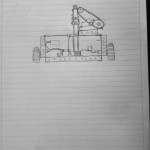
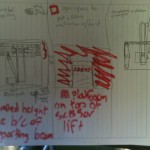
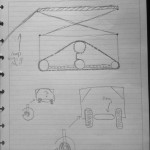
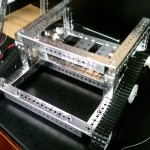
Today was a build day for the machining of our scissor lift. Mr. Brian Johnson helped us, accomplish that. He had to do all of the metal cutting because it is dangerous, but we helped sand some of the pieces and actually began to piece together the scissor lift.Each side of scissor lift consists of 3 Xs reaching a considerable height when extended. We had to go out to get some bits and pieces we needed and we had to hand sand many of the parts on the inside of holes and at weird corners and edges. We all wore safety glasses to protect our lungs. The scissor should be completed by 10.25.12 …Still waiting for our poor computer to get fixed.