
The Suit Bots website has gone unused for quite some time. In fact, 1,218 days have passed since the last post. Thus, I have requested that the website be given to me for updating. Two other editors may accompany me. You may notice some minor changes in the next couple of weeks, mostly being new posts and pictures, but I can assure you that there is more in store.
Moving Mountains
ROBOTICS MEETING 3/15
-Planned for our roles next year
+Sammy and Eli are programming
+Sam and Maritza are mechanical design
+Frosh/ Mr. Porter are build
+Alex is process and documentation
+Kemyl is outreach planning (tentative)
-Prepared our new Suitbots desktop computer (for programming especially)
-Graphics team worked on a design for the Suitbots shirt (soupbox!)
 -The robot’s controllers were tested, and we realized they were malfunctioning when the robot drove itself forward and began pushing the mountain
-The robot’s controllers were tested, and we realized they were malfunctioning when the robot drove itself forward and began pushing the mountain
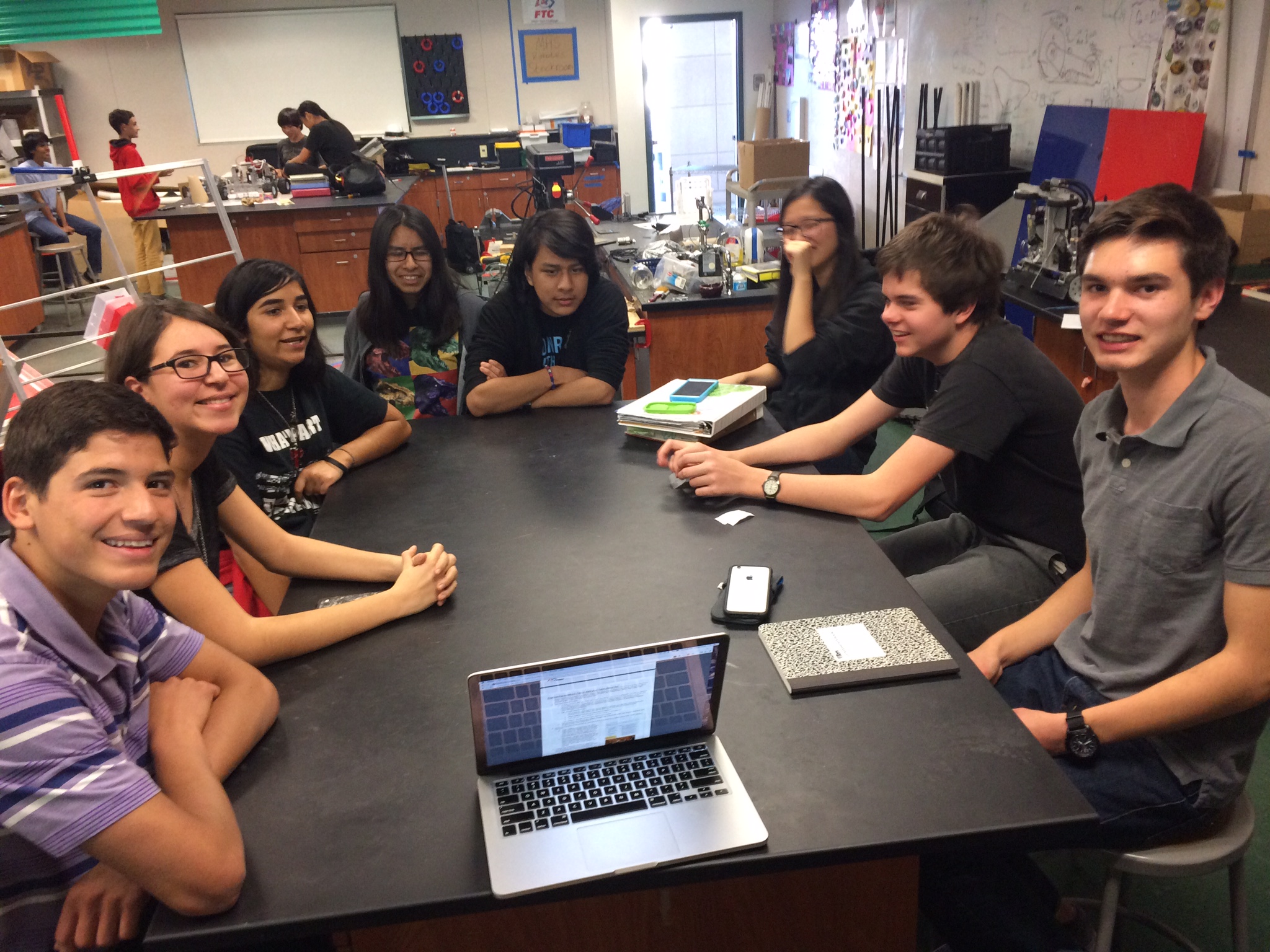
First meeting of the 2016-2017 season
We met to start working on our strategic and sustainability plans. We talked about what goes in to creating each and brainstormed ideas. Sam is going to take out notes for the day and amend this post before our next meeting.
Here are some of our notes from the day: new doc 3
In attendance: Kevin, Sam, Brandon, Maritza, Eli, Sammy, Emily, Hye and Kemyl.
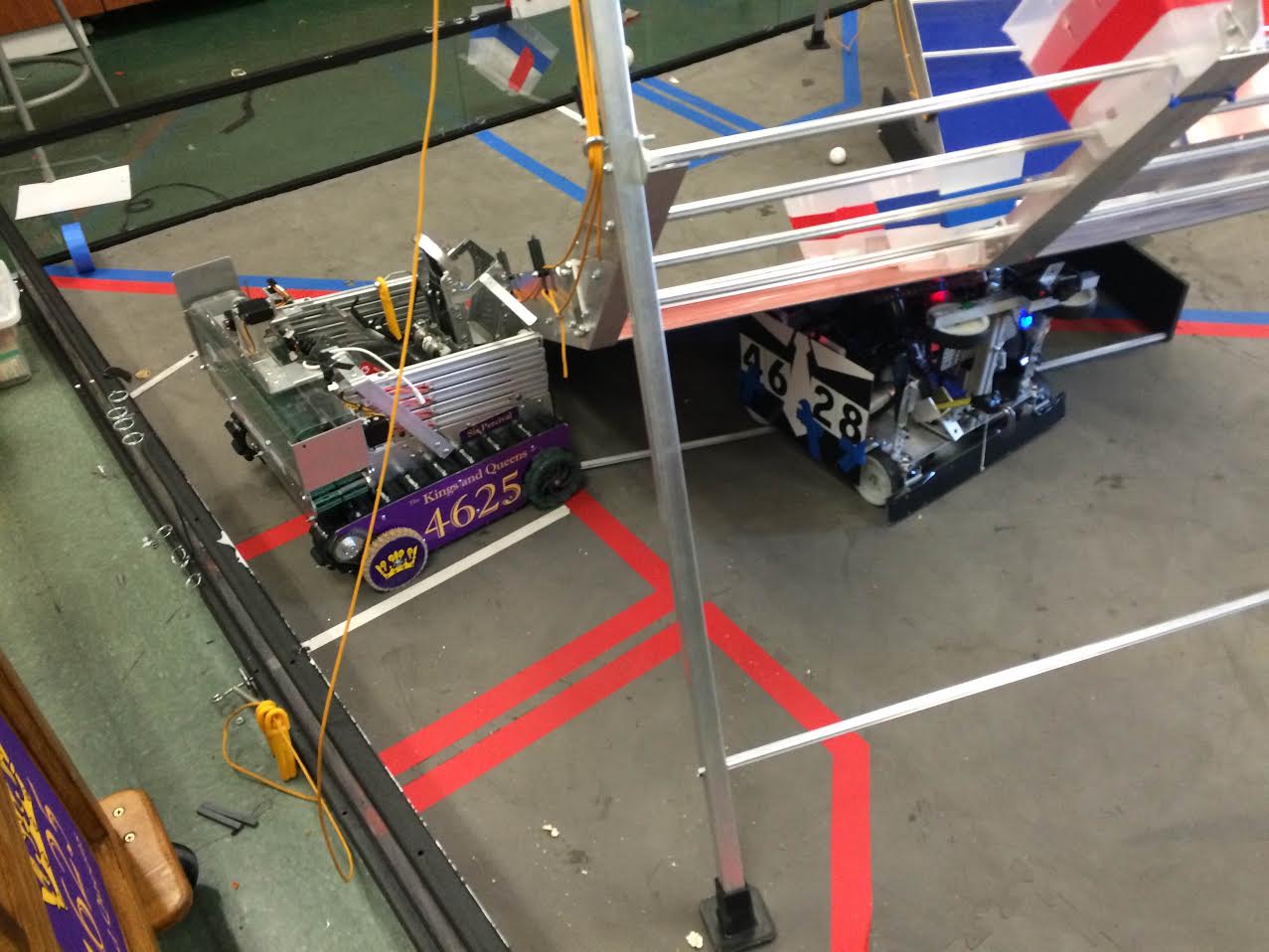
Playing the Game with People
Cascade effect has been out now for two weeks, and as a part of the brainstorming that we’ve been doing, we played the game with people instead of robots. We did this last year for Block Party! and in it discovered the need for a holonomic drive. Below is video and a laundry list of things we discovered this year:
- Dragging the tubes around haphazardly is very difficult, especially with the tallest one. Having a major penalty on top of a loss of 90cm worth of balls in the x3 tube is a huge loss in points.
- Most of the time, some of the large balls get caught in the center element after you knock the kickstand over. For the end game, it’d definitely be worth it to have those big balls in the high tube.
- The large balls were gone basically immediately, since the pack the least densely.
- Because of this, filling the tall tube first was a fairly successful strategy because you get points at a very great rate that way.
- A neat defensive strategy is to fill up the small tube and put it on the side of the field that you opponent is on, because they won’t want to run into it and knock it over, so they’ll be a little trapped.
- People tended to stay on one side of the field until the second half of the match since there were enough balls to satisfy 3 tubes on either side, but this was also with one player per alliance.
Autonomous Challenge—First 2 Challenges
We’re glad to announce our first two autonomous challenges. They are the following:
Simple Ramp
Taken from this year’s FTC game, this is an autonomous for beginning teams.
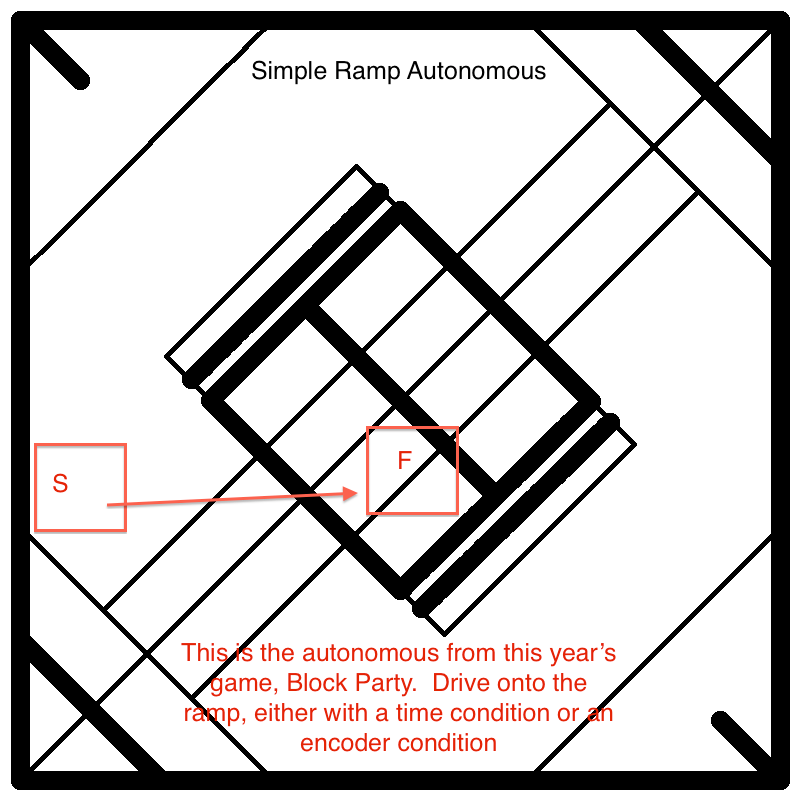
Suggested Sensors
- Motor Encoders
Line Following 1
A basic line following task. Good for the more advanced teams.
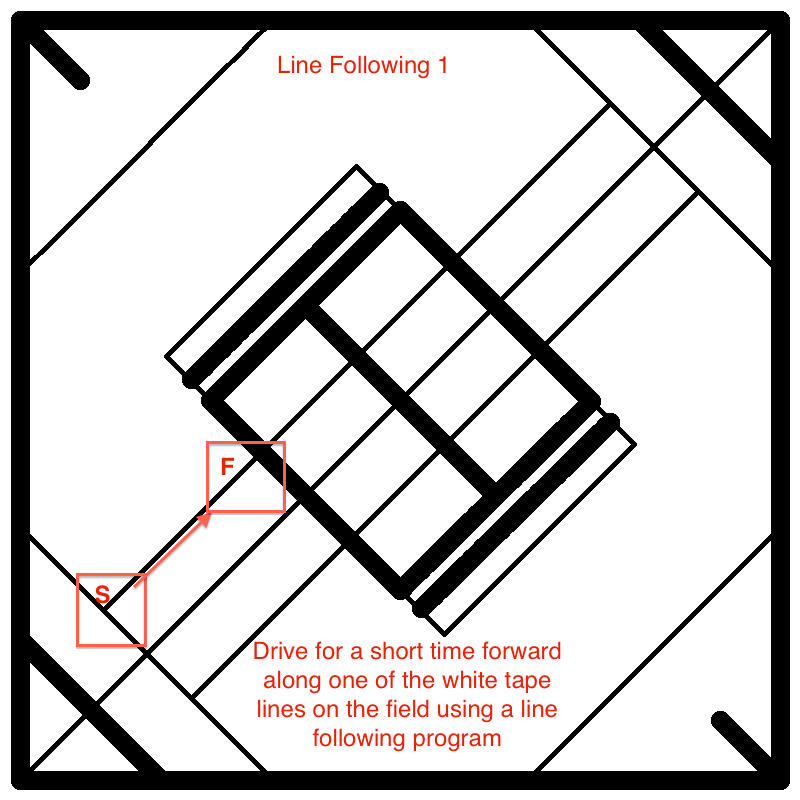
Suggested Sensors
- One of the following:
- LEGO Ambient light sensor
- LEGO Color Sensor
- HiTechnic Color Sensor
- HiTechnic EOPD Sensor
Generally, having multiple of the same kind of sensor will make your line following better. This article has some information as to the different kind of algorithms one can use.