Attendance
- Mark
- Hunter
- Evan
- Erik
- Dante
- Fletcher
Journal
Tasks
- Get in one of the final alliances
- Try to win most of our matches
- Get our name out to all of the other teams
- Offer help to any team who needs it
- Have our IR autonomous work at least once
- Get at least one tic-tac-toe on the top level
- Pass all inspections
- Bond as a team
Reflections
We passed all of our inspections with much ease. Our interview went very well too although Evan, Hunter, and Fletcher were still at inspection for the first half of the interview and they came for the second half. Everyone talked a good amount and the judges seemed very impressed.
Then came our first match. The autonomous was about to work but team 4625 pushed us out of the way with their blocking autonomous. Then, once TeleOp started, we lost connection almost immediately and we periodically throughout the match regained connection for a few seconds and lost the connection directly after. We lost this match 60 – 0
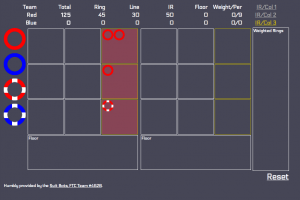
In the second match, our autonomous also nearly worked but it was off a little due to the ledge of the center goal area. We lost connection a little during the TeleOp but for the most part we were fine, although at the end of the match our mechanism for moving the hand up and down that’s mounted on the scissor lift didn’t lift up all the way so it made us not be able to pick up rings at the end. We won this match 80 – 30 and we were able to place two rings on the top row. Lunch break, and repairs for the robot. Since we lost connection again we knew it was our problem with the wires. We thought the problem might be that the Samantha was malfunctioning due to a wire problem that made the power to it waver frequently, so we investigated how we might fix that.
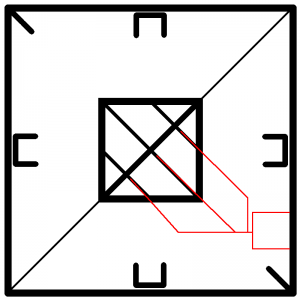
The Third Match: This was the most amazing robotics match we have ever participated in in all of robotics. Our autonomous placed the ring on the IR column on the bottom row, in TeleOp, we did this:
Come the End Game, we lifted our alliance partner’s robot (which had not been built for more than 5 hours) 17″, getting us the LA area’s highest lift and Getting us a final score of 235, an LA area high.
In the fourth match, we were devastated. Our robot didn’t work at all save one motor. We had one motor serial that had the motor for our fork lift on it, and it worked, though we couldn’t use it because the forklift was against the wall. We are yet to diagnose what went wrong.
In the fifth and final match, we did no better; we had the same problem.
We did our best, there’s only so much we can do, but we did score the highest score in LA which is pretty amazing.
We we ended up in 12th place and did not get chosen for a final alliance (though we were second choice for several teams), which is less than what we had hoped for.
When it came to awards time, they were setting the tournament computer up for the Promote award presentation and played the first couple of seconds, which happened to be the same first couple seconds as our Promote video. Fletcher proceeded to have a freak-out, as he was quite excited, and got told to calm down since we hadn’t gotten the award yet. After the Awards ceremonie got started, they played our Promote Video and announced us as the winners of the Promote Award. The rest of the awards got announced and we were finalists for each of these:
- Rockwell Collins Innovate Award
- Connect Award
- PTC Design Award
- Motivate Award
This happens to be every judged award besides the Think award. At the end the ceremonie, they announced the Inspire Award. Third Place went to Simi Valley Robotics, second to Monrovia’s own Kings and Queens Team 4625, and first place Inspire Award went to us, the Suit Bots Team 4628!